-
Tutorial on robotics and control
Learning objectives: Understand the system and control of mass-spring-damper system and planar RR robot Understand how PD and PID control shape closed-loop error dynamics Derive the forward kinematics, Jacboian, numerical inverse kinematics and Euler-Lagrange dynamics of a plannar RR robot Build up your intuition of various types of control method...
-
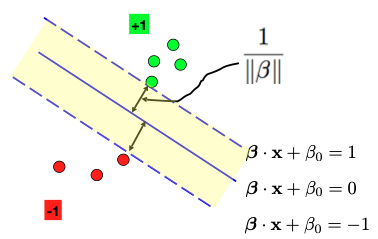
SVMs Dual Formulation
Background Lagrange Duality KKT Condition Hard Margin SVM Soft Margin SVM L1 Regularization L2 Regularization SVM Solver in Python References Background Support Vector Machines (SVMs) are a powerful and versatile class of supervised learning models used for classification and regression tasks. They are particularly known for their ability to handle...
-
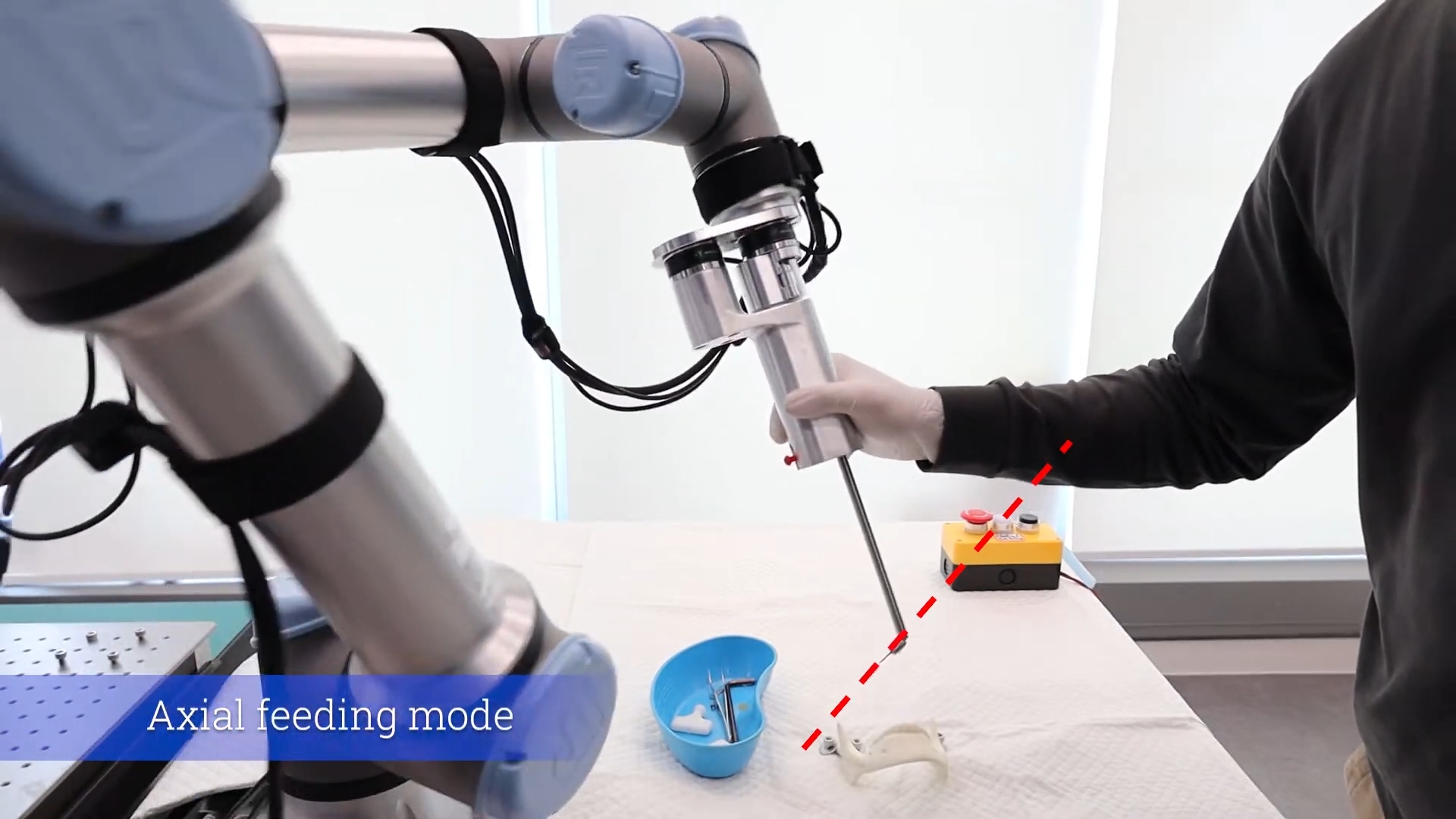
Shared-Control Surgical Drilling Robot
Background Control Framework Admittance Control Convex Optimization Equality Constraints Inequality Constraints Video Demonstration Lessons Learned References Background This is a project I did for the 2022 Surgical Robot Challenge and other related publications. The objective was to design a shared-control robot platform with a articulated drill as the end-effector for...
-
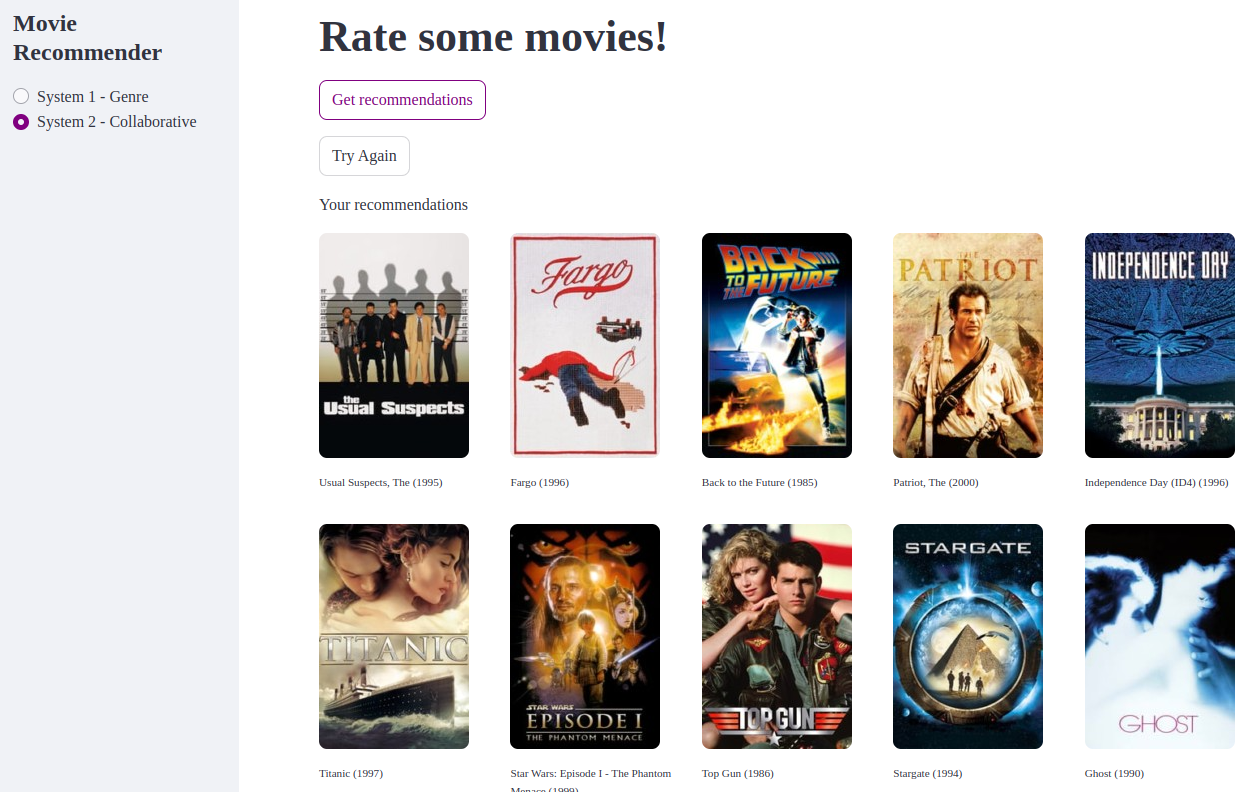
Movie Recommendation with Item-based Collaborative Filtering
Background Item-based Collaborative Filtering Background I have completed the CS598 Practical Statistical Learning course last semester (2024 Fall). This course covers the basic concepts of statistical learning, including linear models, non-linear models, and ensemble methods. The last project of the course is to build a movie recommendation system using item-based...